算法概览¶
随着信息社会的飞速演进,数据正以爆炸式的速度增长。为了驯服这股洪流,人类不断突破硬件极限并优化算法,催生了以 Kubernetes 为代表的分布式服务、MapReduce 为代表的分布式计算,以及 Transformer 为代表的深度学习架构。若要真正掌握这些前沿技术,必须向下扎根,深入理解底层原理。因为在任何行业中,真正的核心竞争力始终根植于对底层原理的深刻洞察——这种洞察力是 AI 无法模拟的独特智慧,也是在技术更迭中保持常青的唯一秘诀。
学习指南¶
为什么要学习底层原理?¶
学习计算机科学,应该 追求树根而非树叶——掌握操作系统、数据结构、算法、网络等基础知识,而非仅仅停留在上层 API 的使用。这些底层原理如同牛顿三定律之于经典力学:只要计算机仍基于冯·诺伊曼结构,它们就永不过时。
基础知识无处不在:
- Merkle 树:Git 版本控制和比特币的基石
- 公钥密码学:HTTPS 证书、加密货币、数字签名、SSH 登录
- 哈希链表:Git 的 commit 历史、区块链的数据结构
- B+ 树:数据库索引的基础(MySQL InnoDB)
从技术到哲学:
深入学习后就会发现,许多算法思想已经上升到哲学层面:空间换时间的权衡、指针操作的精妙、Unix 的设计哲学……这些都是计算机科学中永恒的智慧。
算法的本质就是聪明地穷举。 我们通过组合不同数据结构的特性,聪明地穷举问题,从而找到最优解。
学习算法的正确心态
我们是在学习算法,而非发明算法。 遇到不会的题目,直接看题解或教程是正确的学习方式——许多精妙的算法思想确实难以独立想出。
如何高效学习算法?¶
1. 利用优质资源
互联网上有丰富的可视化教程和讲解:
可视化工具:
文字教程:
- Hello 算法 - 动画图解、能运行、可提问
- Labuladong 算法小抄 - 框架思维、通俗易懂
2. 先广度后深度
第一遍:快速过一遍主要算法类型
- 建立全局认知:知道每种算法解决什么问题
- 克服畏难情绪:畏难源于未知,把未知变为已知,难度自然降低
第二遍:针对性练习
- 理解算法原理
- 大量刷题巩固
3. 正确认识难度
算法并不难,难的是克服自己的畏难情绪。只要理解原理 + 大量练习,就能掌握。
核心思维与技巧¶
核心思维模式¶
-
空间换时间:
- 数据结构:哈希表、前缀和、差分数组、记忆化 (DP)。
- 系统设计:Buffer (平滑抖动)、Cache (避免重复计算)。
- 核心:利用额外存储减少重复计算或加速访问。
-
公式推导四步法:
- 目标:求什么?
- 变量:哪些参数在变?
- 时机:变量何时变化?
- 终止:何时结束?
-
手动模拟 (Visualization):
- 思路卡壳时,手动模拟小数据。
- 画出执行过程:递归树、DP 状态表、指针移动轨迹。
工程实践与边界控制¶
-
边界条件检查清单:
通用边界 特定结构边界 □ 空 / nil / 0
□ 单元素
□ 双元素
□ 极值 (Max/Min)
□ 负数□ 树:空树、单侧树
□ 链表:环、断链
□ 串:回文、字符集
□ 图:孤岛、自环 -
向上取整 (Ceil) 技巧: 在分页 (Page), 分块 (Chunk)时,经常需要计算 \(a/b\) 的 向上取整 结果(比如 10 条数据,每页 3 条,需要分 4 页)。相比于转换浮点数调用
math.Ceil,使用纯整数运算不仅 性能更高,且能彻底避免浮点数 精度丢失 的风险。对于正整数 \(a > 0, b > 0\),有两种常见公式:
公式类型 核心公式 优点 缺点/限制 经典公式 (推荐) (a + b - 1) / b兼容 \(a=0\) \(a\) 接近 MaxInt 时可能溢出 防溢出公式 (a - 1) / b + 1无溢出风险 \(a=0\) 时结果错误 (算成 1) 代码示例:
编码小技巧¶
-
方向反转变量:
- 场景:Z 字形变换、往复运动。
- 技巧:用
dir = -1配合dir = -dir替代复杂的if-else。
-
逆序修改:
- 场景:数组原地移除元素、合并两个有序数组。
- 技巧:从后往前 遍历/填充,避免覆盖未处理元素。
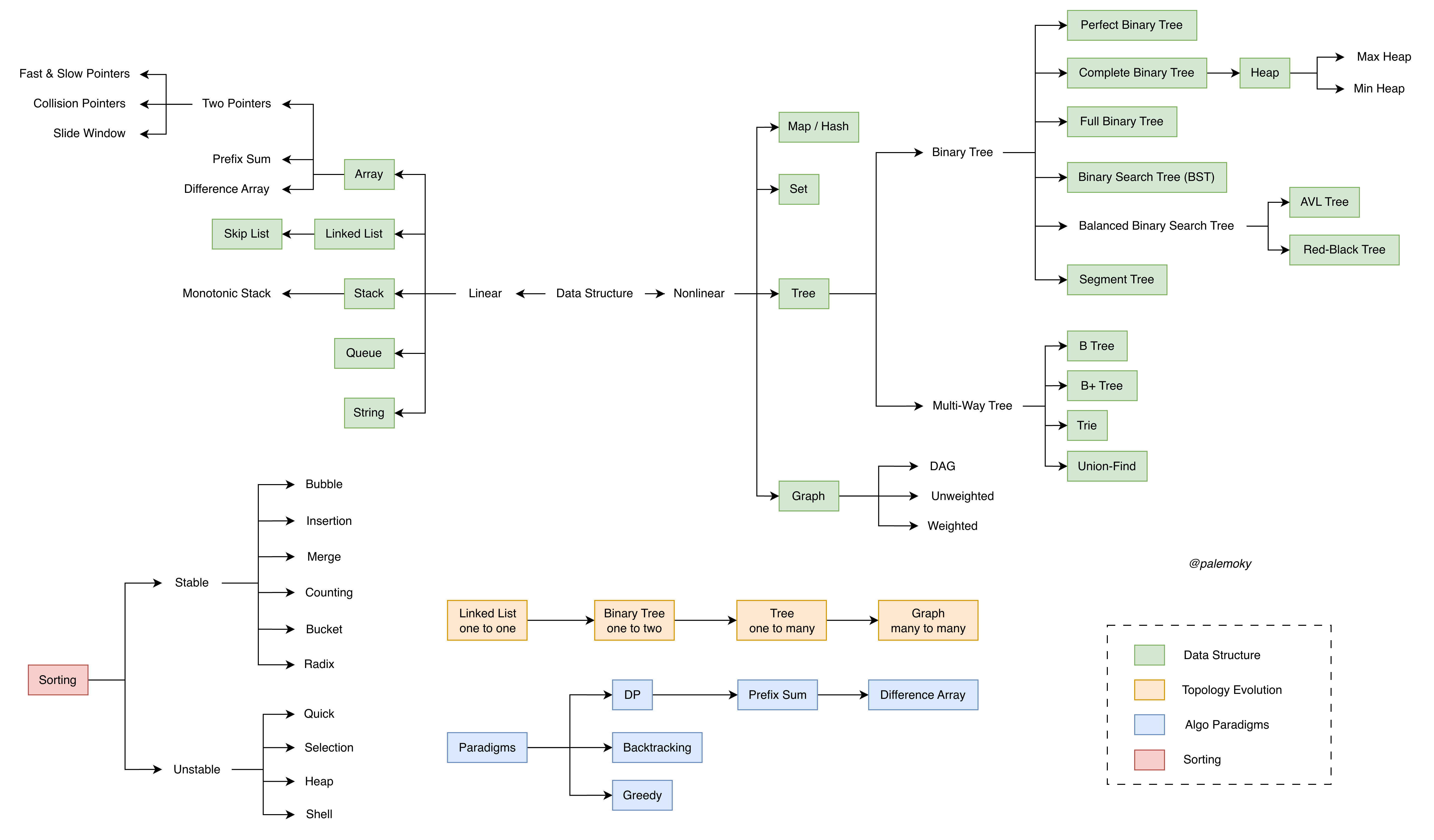
基础概念¶
指针¶
指针在计算机中是非常重要的概念,是链表、树、图等重要数据结构的基础。用好指针,不仅能写出高效的代码,也能避免一些常见的错误。
在编程中,对于大的数据对象,采用的也是指针传递。即使普通的变量,在被垃圾回收时,也只是删除了指针,而被使用的内存数据不会被删除(即脏数据),因此每次创建变量时,都需要初始化为干净的内存空间,避免使用脏数据。
数组与链表¶
我们可以把数组想象为一排紧密排列的储物柜,每个储物柜中都可以存储数据。因为柜子是连续摆放的,我们只要知道了这一排柜子的起始位置,就能以 \(O(1)\) 的时间复杂度直接计算出任意一个柜子的位置。 而链表则像是一个寻宝游戏。每个藏宝点(节点)里都放着一张纸条,指引你下一个藏宝点在哪里。这些点分散在地图的各个角落(内存非连续),你必须从起点开始,顺着线索一步步寻找,无法直接“空降”到终点。 有了储物柜这个例子,就非常好理解为什么数组下标从 0 开始:下标代表的是“偏移量”(即需要走的步数)。
- 访问第一个元素,意味着站在原地不动,偏移量为 0。
- 访问第二个元素,需要走 1 步,偏移量为 1。
正因为这种连续的物理结构,计算机只需知道“起点”和“步数”,就能以 \(O(1)\) 的极致速度直接定位到数据:Addr=Start+Index×Size。
复杂度分析¶
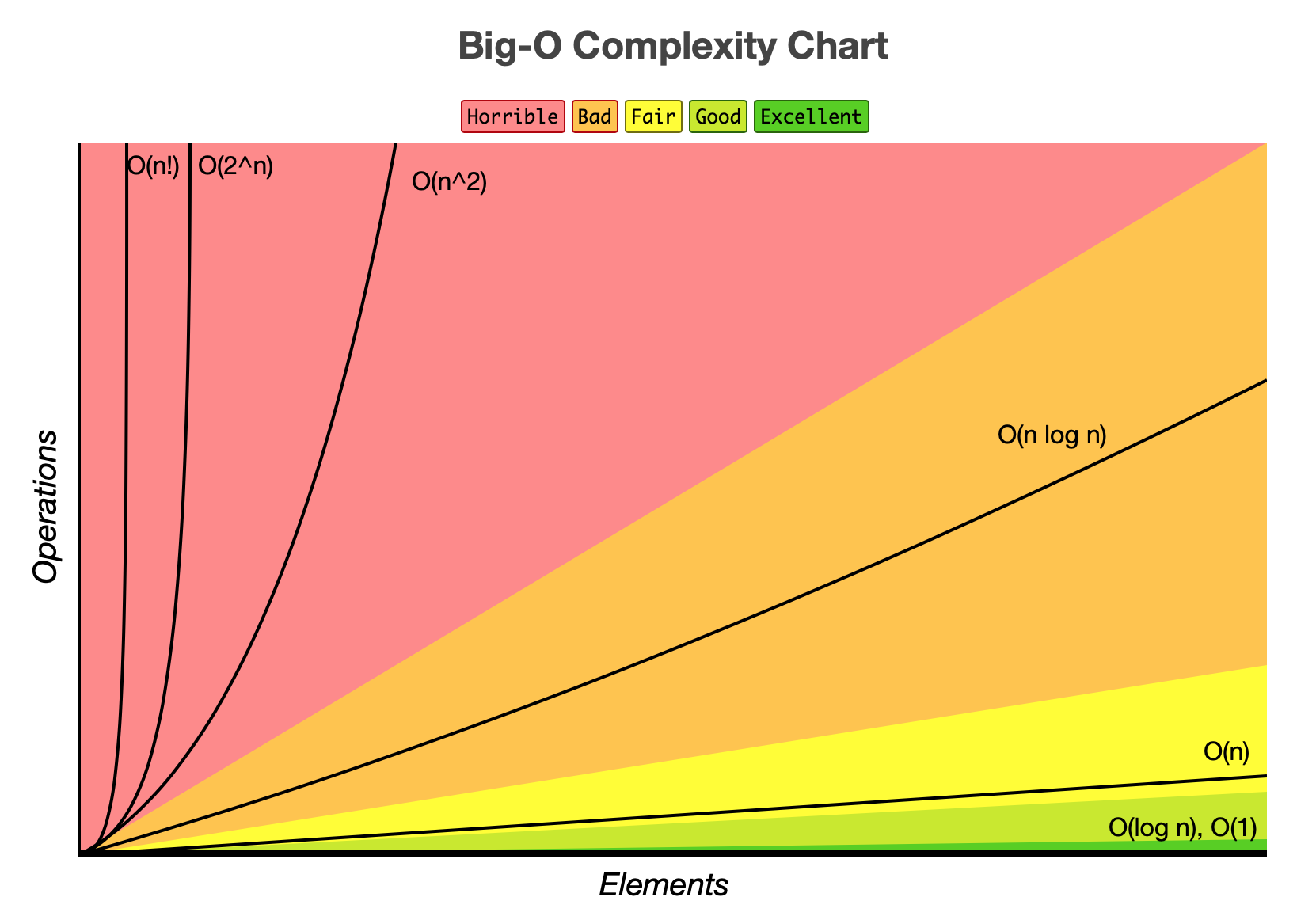
复杂度分析是算法评估的核心工具,用于衡量算法在 输入规模趋向无穷大时 的资源消耗趋势,而非具体的执行时间或内存数值。我们用 大 O 符号(Big-O) 表示渐近上界,忽略常数系数与低阶项,通常从时间和空间两个维度评估算法性能:
| 复杂度 | 名称 | 典型场景(时间) | 典型场景(空间) |
|---|---|---|---|
| \(O(1)\) | 常数阶 | 哈希表查找、数组随机访问 | 原地算法:双指针、位运算 |
| \(O(\log n)\) | 对数阶 | 二分查找、平衡 BST 操作 | 递归深度为 \(\log n\):二分递归、平衡树操作 |
| \(O(n)\) | 线性阶 | 单次遍历数组、链表 | 辅助数组、哈希表、BFS 队列、递归深度为 \(n\) 的链表遍历 |
| \(O(n \log n)\) | 线性对数阶 | 归并排序、堆排序、快速排序期望 | 归并排序的递归展开(同时保留各层临时数组) |
| \(O(n^2)\) | 平方阶 | 冒泡排序、暴力双重循环 | DP 二维状态表、邻接矩阵 |
| \(O(2^n)\) | 指数阶 | 子集枚举、暴力回溯 | |
| \(O(n!)\) | 阶乘阶 | 全排列暴力枚举 |
复杂案例分析¶
案例 1:最近公共祖先(LCA)+ 路径查询
给定一棵 \(n\) 个节点的树和 \(q\) 次路径查询,用倍增法预处理:
- 预处理:\(O(n \log n)\)(对每个节点记录 \(\log n\) 级祖先)
- 单次查询:\(O(\log n)\)(二进制提升跳祖先)
- 总复杂度:\(O((n + q) \log n)\)
当 \(q \approx n\) 时可以简写为 \(O(n \log n)\);当 \(q \gg n\) 时主项是 \(O(q \log n)\)。
案例 2:滑动窗口 + 有序集合(单调队列)
在长度为 \(n\) 的数组上,用大小为 \(k\) 的滑动窗口求每个窗口的最大值:
- 暴力:每个窗口线性扫描 → \(O(nk)\)
- 单调队列:每个元素最多入队、出队各一次 → \(O(n)\)
- 有序集合(如平衡 BST):每次插入/删除 \(O(\log k)\),共 \(n\) 次 → \(O(n \log k)\)
案例 3:矩阵二分搜索
在 \(m \times n\) 的"行列均有序"矩阵中搜索目标值:
- 二分每行:对 \(m\) 行各做一次 \(O(\log n)\) 二分 → \(O(m \log n)\)
- Z 字形遍历(从右上角开始):每步排除一行或一列 → \(O(m + n)\)
这说明同一问题可因算法选择而产生截然不同的复杂度。
案例 4:Dijkstra 最短路径
图有 \(V\) 个顶点、\(E\) 条边:
- 暴力实现(邻接矩阵):\(O(V^2)\)
- 优先队列(二叉堆)实现:每次松弛入堆 \(O(\log V)\),最多 \(E\) 次松弛 → \(O((V + E) \log V)\)
- 斐波那契堆:减少
decrease-key代价 → \(O(E + V \log V)\)
稀疏图(\(E \approx V\))用堆优化更佳;稠密图(\(E \approx V^2\))暴力实现反而更优。
案例 5:外排序 / K 路归并
将 \(n\) 条数据分成 \(k\) 路有序子序列后做归并:
- 每次从 \(k\) 路中取最小值(用大小为 \(k\) 的小顶堆):\(O(\log k)\)
- 共取 \(n\) 次:\(O(n \log k)\)
当 \(k = n^{1/2}\) 时,复杂度约为 \(O(n \log \sqrt{n}) = O(\frac{n}{2} \log n)\),常用于磁盘外排序场景。
时间与空间的权衡
复杂度优化往往是空间换时间的博弈:
- 记忆化搜索(Memoization):\(O(n^2)\) 时间 + \(O(n^2)\) 空间,换掉指数级暴力;
- 前缀和:\(O(n)\) 预处理空间,换掉每次区间查询的 \(O(n)\) 时间;
- 将归并排序的 \(O(n)\) 辅助空间省掉,代价是实现复杂度大幅上升。